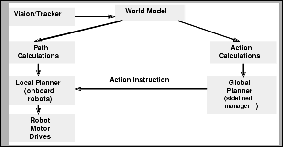
Overall communication flow is summarized in Figure ![]() .
Values in the world model are used to calculate the locations of team
robots and orientation as well as the ball's position on the field. The
robot that is to perform an action is determined in the action
calculations step. Determination of the ball's projected position at
the time the player will make contact is also determined in this step.
The global planner then informs the local planner of the action the
robot is to take.
.
Values in the world model are used to calculate the locations of team
robots and orientation as well as the ball's position on the field. The
robot that is to perform an action is determined in the action
calculations step. Determination of the ball's projected position at
the time the player will make contact is also determined in this step.
The global planner then informs the local planner of the action the
robot is to take.
The function of the local planner is to determine the shortest path of least resistance to execute the desired action. The locations of opponents, as well as the shortest path to the projected position of the ball that avoids each opponent, are calculated in the path calculations step. Once the local planner has received both an action and path to take, it signals the robot to execute these plans.