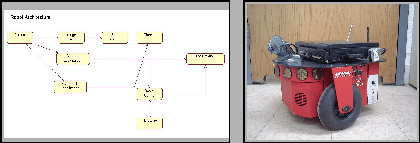
Figure ![]() describes architecture of Pioneer2-DX. Base
Control functions such as movement are performed through the embedded
hardware. Vision and localization is implemented with a firewire camera
taking images at 30 frames per second and processes images using the
XVision library. Image processing or tracking allows for detection of
known objects such as ball, teammates and field markers and avoidance of
unknown objects, such as opponents. The software planner manages all of
the actions performed by the robot.
describes architecture of Pioneer2-DX. Base
Control functions such as movement are performed through the embedded
hardware. Vision and localization is implemented with a firewire camera
taking images at 30 frames per second and processes images using the
XVision library. Image processing or tracking allows for detection of
known objects such as ball, teammates and field markers and avoidance of
unknown objects, such as opponents. The software planner manages all of
the actions performed by the robot.