


Next: Bibliography
Up: Software Architecture and Strategy
Previous: Strategy and Basic Player
As the environment of the soccer game is very complex, every situation
encountered by the players should be evaluated and the best possible
action taken. An example of an action would be moving to a point or
passing the ball. To evaluate a game state a cost function is programmed
into every robot. The cost function is a sum of products of a
robot-situation-criterion (rsc) and a weight assigned to given
criterion. The higher the weight of the criterion the more "expensive"
the cost is. After the cost functions for every player are evaluated,
the managing mechanism selects a player take action. Examples of basic
rsc:
- rsc1 -distance from assigned field (defense players have to stay
in the defined field near the goal). For defense players high deviation
would get a high weight while for forward players an advance on the
opponent's goal gets a low weight.
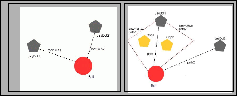
- rsc2 - distance to ball. Two teammates can be located close to the
ball so the lower weight will be assigned to the closest robot. See
Figure
![[*]](file:/usr/lib/latex2html/icons/crossref.png) .
.
- rsc3 -freedom of motion. The decision is made when moving from one point
to another based on whether there are objects to be avoided. A high
congestion of opponents would get a high weight. See
Figure .
Figure:
(left) Distance s2 is less than distance
s1, so JayBot2 is assigned a lower weight for rsc2; (right) here exists
a situation where rsc2 for JayBot1 has lower weight than JayBot2. While
path1 is shorter than path2, objects need to be avoided, so rcs3 weight
forJayBot1 increases.
 |
At the beginning of the training period the cost functions for all
robots are evaluated for different situations and the robots rely on the
managing mechanism. As the course of training progresses the cost
functions for situations encountered are memorized and the reliance on
the manager eases.
Next: Bibliography
Up: Software Architecture and Strategy
Previous: Strategy and Basic Player
Darius Burschka
2001-04-04